在一种称为深度强化学习 (DRL) 的机器学习形式的帮助下,洛桑联邦理工学院的机器人特别学会了从小跑过渡到前足步态——跳羚和瞪羚等动物使用的一种跳跃、弓背步态——以应对具有挑战性的环境。地形间隙为 14-30 厘米。 这项研究由洛桑联邦理工学院工程学院生物机器人实验室领导,为动物为什么以及如何发生这种步态转变提供了新的见解。
“之前的研究将能量效率和避免肌肉骨骼损伤作为步态转变的两个主要解释。最近,生物学家认为平坦地形上的稳定性可能更重要。但动物和机器人实验表明,这些假设并不总是有效,特别是在不平坦的地面上,”博士生米拉德·沙菲伊(Milad Shafiee)说道,他是《自然通讯》上发表的论文的第一作者。
因此,Shafiee 和合著者 Guillaume Bellegarda 以及生物机器人实验室负责人 Auke Ijspeert 对步态转变发生原因的新假设感兴趣:可行性或避免跌倒。 为了验证这一假设,他们使用 DRL 来训练四足机器人穿越各种地形。 在平坦的地形上,他们发现不同的步态对随机推动表现出不同程度的鲁棒性,并且机器人从步行切换到小跑以保持生存能力,就像四足动物加速时所做的那样。 当遇到实验表面连续的间隙时,机器人会自发地从小跑切换到前蹲以避免跌倒。 此外,生存能力是这种步态转变所改善的唯一因素。
“我们表明,在平坦地形和具有挑战性的离散地形上,生存能力会导致步态转换的出现,但能量效率不一定会提高,”Shafiee 解释道。 “以前被认为是这种转变的驱动因素的能源效率似乎可能更重要。当动物在具有挑战性的地形中航行时,它的首要任务很可能不是下跌,其次是能源效率。”
仿生学习架构
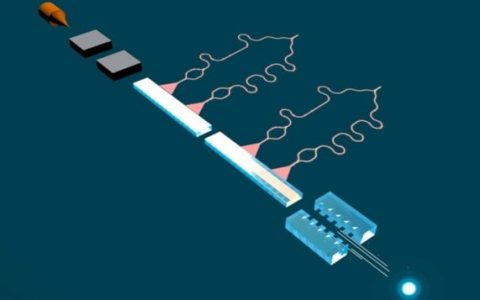
为了模拟机器人的运动控制,研究人员考虑了驱动动物运动的三个相互作用的元素:大脑、脊髓和身体的感觉反馈。 他们使用 DRL 来训练神经网络,以模仿机器人穿越实验地形时脊髓将大脑信号传输到身体的过程。 然后,团队为三个可能的学习目标分配了不同的权重:能源效率、减少力量和生存能力。 一系列计算机模拟显示,在这三个目标中,生存能力是唯一一个促使机器人在没有科学家指导的情况下自动改变其步态的目标。
研究小组强调,这些观察结果代表了第一个基于学习的运动框架,其中步态转换在学习过程中自发出现,以及四足机器人如此大的连续间隙的最动态跨越。
沙菲伊说:“我们的仿生学习架构展示了最先进的四足机器人在充满挑战的地形上的敏捷性。”
研究人员的目标是通过额外的实验来扩展他们的工作,将不同类型的机器人置于更广泛的挑战性环境中。 除了进一步阐明动物运动之外,他们希望最终他们的工作将使机器人更广泛地用于生物研究,减少对动物模型的依赖和相关的伦理问题。
资讯来源:由a0资讯编译自THECOINREPUBLIC。版权归作者A0资讯所有,未经许可,不得转载